Abstract
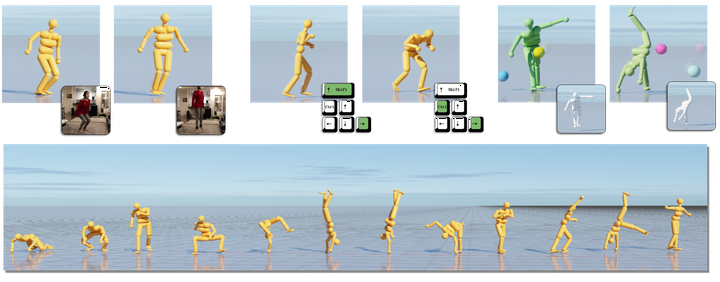
The field of physics-based animation is gaining importance due to the increasing demand for realism in video games and films, and has recently seen wide adoption of data-driven techniques, such as deep reinforcement learning (RL), which learn control from (human) demonstrations. While RL has shown impressive results at reproducing individual motions and interactive locomotion, existing methods are limited in their ability to generalize to new motions and their ability to compose a complex motion sequence interactively. In this paper, we propose a physics-based universal neural controller (UniCon) that learns to master thousands of motions with different styles by learning on large-scale motion datasets. UniCon is a two-level framework that consists of a high-level motion scheduler and an RL-powered low-level motion executor, which is our key innovation. By systematically analyzing existing multi-motion RL frameworks, we introduce a novel objective function and training techniques which make a significant leap in performance. Once trained, our motion executor can be combined with different high-level schedulers without the need to retrain, enabling a variety of real-time interactive applications. We show that UniCon can support keyboard-driven control, compose motion sequences drawn from a large pool of locomotion and acrobatics skills and teleport a person captured on video to a physics-based virtual avatar. Numerical and qualitative results demonstrate a significant improvement in efficiency, robustness and generalizability of UniCon over prior state-of-the-art.